




服务热线
0769-28680919
153-2293-3971 / 177-0769-6579

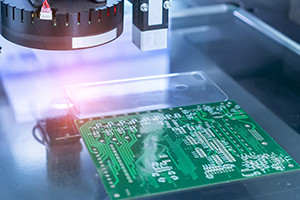
康耐德智能变压器视觉定位抓取系统是一个高度专业化的工业自动化解决方案,专门针对变压器制造、装配或检测过程中的关键环节。它结合了机器视觉、精密机械手控制、人工智能(AI)算法等技术,实现对变压器(尤其是线圈、铁芯、壳体等部件)的高精度定位、识别,提供定位数据到机械手实现自动化抓取/搬运/放置。

以下是该系统的核心要素和特点:
核心目标:
自动化: 替代人工进行繁重、重复或精密的变压器部件抓取、搬运、装配工作。
精准定位: 克服变压器部件(尤其是线圈)形状复杂、易变形、表面特性(如反光、油污)带来的定位困难,实现亚毫米级甚至更高的定位精度。
柔性生产: 适应不同型号、尺寸的变压器,快速切换生产任务。
质量保障: 通过精确抓取和放置,减少人为失误,保证装配精度;可集成视觉检测环节(如线圈缺陷检测、引脚位置检测)。
提高效率: 显著提升生产节拍,降低人工成本和劳动强度。
核心组成部分:
工业相机系统:
类型: 通常采用高分辨率工业相机(面阵或线阵),可能结合2D、3D(如结构光、激光三角测量、双目视觉)技术。3D视觉对复杂曲面、深度信息(如线圈高度、引脚凸起)的获取至关重要。
光源: 定制化的照明方案(如环形光、同轴光、条形光、背光),确保在各种表面(亮面、哑光、有油污)和环境下都能获得清晰、高对比度的图像,抑制反光干扰。
图像处理与视觉定位软件:
核心算法: 强大的图像处理算法(滤波、边缘检测、特征提取)和模式识别算法(模板匹配、特征匹配、深度学习目标检测/分割)。
定位引擎: 能够根据图像特征,精确计算出目标物体(如变压器线圈、铁芯片、引脚、壳体定位孔)在空间中的位置 (X, Y, Z) 和姿态 (Rx, Ry, Rz)。
深度学习/AI: 越来越多地应用深度学习模型(如CNN)来处理复杂背景、遮挡、变形或表面纹理变化大的情况,提高定位的鲁棒性和精度。
机器人系统(机械手):
类型: 通常选用高精度、高稳定性的工业机器人(如六轴关节臂机器人、SCARA机器人),负载能力需匹配变压器部件的重量。
末端执行器: 定制设计的夹具(如气动夹爪、电磁吸盘、真空吸盘、自适应夹具),确保能安全、无损、可靠地抓取各种形状和材质的变压器部件(易碎的线圈、沉重的铁芯、光滑的壳体)。
控制系统:
集成: 作为系统大脑,集成视觉系统、机器人控制器、PLC(可编程逻辑控制器)或上位机。
通信: 实现各组件间的高速、稳定通信(如EtherCAT, EtherNet/IP, Profinet)。
路径规划: 根据视觉定位结果,实时计算机械手的最优抓取路径和放置路径,避免碰撞。
用户界面(HMI):
提供图形化操作界面,用于系统监控、参数设置(如视觉参数、机器人路径)、程序选择、报警处理、生产数据统计等。
工作流程(典型):
上料/待抓取: 变压器部件(如线圈)通过传送带、料盘或其他方式到达指定工位,位置可能有一定随机性(需定位)。
图像采集: 工业相机(可能安装在固定支架或机器人上)在合适的光照条件下拍摄目标区域的图像。
图像处理与定位:
视觉软件分析图像,识别目标物体(如线圈)。
提取关键特征(如边缘、角点、孔位、特定标记点)。
计算目标物体相对于机器人基坐标系或相机坐标系的精确3D位置和姿态。
坐标转换与路径规划: 将视觉系统计算出的目标位置姿态,通过手眼标定关系,转换到机器人基坐标系下。控制系统据此计算机械手末端执行器需要到达的精确抓取位姿,并规划无碰撞运动路径。
机器人抓取: 机械手沿规划路径移动到目标位置,末端执行器(夹具)执行抓取动作(夹紧、吸取等)。
搬运与放置: 机械手将抓取到的部件搬运到指定位置(如下一道工序的工装、检测台、装配位置),并精确放置到位。放置过程可能也涉及视觉引导(二次定位)。
复位/循环: 机械手复位,等待下一个抓取指令,循环进行。
技术亮点与挑战:
高精度要求: 变压器装配对线圈、铁芯等的定位精度要求极高(常需达到0.1mm甚至更高),视觉系统和机器人需协同达到此精度。
复杂目标处理: 线圈表面铜线纹理、绝缘材料、可能的油渍;铁芯片叠层边缘;壳体孔位等,都给稳定可靠的视觉识别带来挑战。
抗干扰能力: 需克服车间环境光变化、电磁干扰(变压器本身可能产生)、工件表面反光、油污、粉尘等影响。
柔性化: 系统需能快速适应不同型号变压器部件,视觉程序和机器人程序切换要便捷。
实时性: 整个定位-计算-抓取过程需在极短时间内完成(通常几百毫秒到几秒),以满足生产节拍。
可靠性与稳定性: 工业现场要求系统7x24小时稳定运行,故障率低,维护方便。
应用价值:
显著提升生产效率与产能。
大幅提高产品装配精度和一致性,提升产品质量。
降低人工成本,减少因疲劳、疏忽造成的错误和工伤风险。
实现生产过程的数字化、智能化,为MES系统提供数据支持。
增强生产线的柔性,适应多品种、小批量生产模式。
总结:
康耐德智能变压器视觉定位抓取系统是现代智能制造在电力设备行业的典型应用。它通过先进的机器视觉技术克服了变压器部件定位的难题,引导高精度机器人实现自动化抓取、搬运和精确放置,是提升变压器生产自动化水平、保证产品质量、降低成本、实现智能制造转型的关键装备,赋予生产线智能化处理复杂非标工件的能力。
如果您有具体的应用场景(如具体抓取哪种变压器部件、精度要求、节拍要求等),我可以提供更深入的分析或探讨其实现的细节。
 手机镜头生产制造中哪些工序需要点胶
2026-07-12
手机镜头生产制造中哪些工序需要点胶
2026-07-12
康耐德点胶视觉检测系统覆盖全面,对各类胶水具备强大的兼容能力——硅酮胶、面胶、线胶、银浆、透明胶、侧边封胶等
 智能眼镜生产线上点胶视觉检测如何搞定10大关键工序?
2026-07-12
智能眼镜生产线上点胶视觉检测如何搞定10大关键工序?
2026-07-12
今天,我们就来拆解智能眼镜生产中的11个点胶视觉检测关键工序,看看这套“AI+光学”的检测系统,是如何在产线上默默守住品质底线的。
 机器视觉系统可以检测智能眼镜生产制造过程中的哪些缺陷
2026-07-12
机器视觉系统可以检测智能眼镜生产制造过程中的哪些缺陷
2026-07-12
机器视觉系统在智能眼镜生产制造过程中可以检测多种缺陷,涵盖从零部件到整机的各个阶段。
 晶圆线宽机器视觉测量系统
2026-07-05
晶圆线宽机器视觉测量系统
2026-07-05
晶圆线宽机器视觉测量系统是半导体制造前道工艺中的关键质量控制设备,用于在线监测关键尺寸(CD, Critical Dimension)。随着制程节点迈向3nm及以下,这项技术正面临精度、速度与可靠性等多重挑战。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
