




服务热线
0769-28680919
153-2293-3971 / 177-0769-6579

机器人3D引导抓取的工作流程主要涉及以下几个步骤:
图像采集:
使用3D相机(如Mech-Eye工业级3D相机)采集物体的图像与位置信息。
视觉处理:
工控机上运行的梅卡曼德软件基于相机采集的图像和位置信息进行视觉处理,输出物体的位置、姿态以及规划的机器人的运动路径。
手眼标定:
确定相机坐标系与机械手末端坐标系之间的空间关系,即手眼标定。这涉及到求解从相机坐标系到机械手坐标系的变换矩阵,以便将视觉系统识别的物体位置转换为机械手坐标系下的位置。
路径规划:
Mech-Vision机器视觉软件支持对视觉结果进行简单的路径规划,并输出机器人的抓取路径。
接口通信:
机器人侧和视觉系统采用同一标准通信协议进行通信,由机器人侧发送请求,视觉系统处理后返回响应(目标物体的位姿和标签信息)。
抓取执行:
机器人根据视觉系统返回的响应做进一步决策或执行相应的任务,如抓取物体。
实时调整:
机器人在执行过程中,可以根据3D视觉系统提供的实时反馈信息进行调整,以应对零部件的位置偏差或装配错误。
应用案例:
在汽车行业,3D视觉引导技术被用于实现汽车零部件的上下料操作,通过分析3D模型和实际场景的匹配程度,确定零部件的位置和姿态,使机器人能够精确地抓取和放置零部件。
柔性化生产:
3D视觉引导技术能够适应小批量多品种的生产需求,提供更大的灵活性和自适应性,同时带来更高的精确性、可靠性和效率。
通过上述步骤,机器人3D引导抓取系统能够实现对无序堆放的物体进行精准识别、定位和抓取,极大地提高了生产效率和灵活性
 芯片BGA封装底部填充胶质量视觉检测系统
2026-05-17
芯片BGA封装底部填充胶质量视觉检测系统
2026-05-17
BGA(Ball Grid Array,球栅阵列)封装底部填充胶(Underfill)质量视觉检测系统是半导体封装工艺中的关键质量控制环节。底部填充胶用于填充芯片与基板之间的间隙,增强焊点抗疲劳性能,补偿芯片与基板间的热膨胀系数(CTE)不匹配问题。由于BGA焊点隐藏在封装体下方,传统光学检测无法直接观察,必须依靠先进的视觉检测技术。
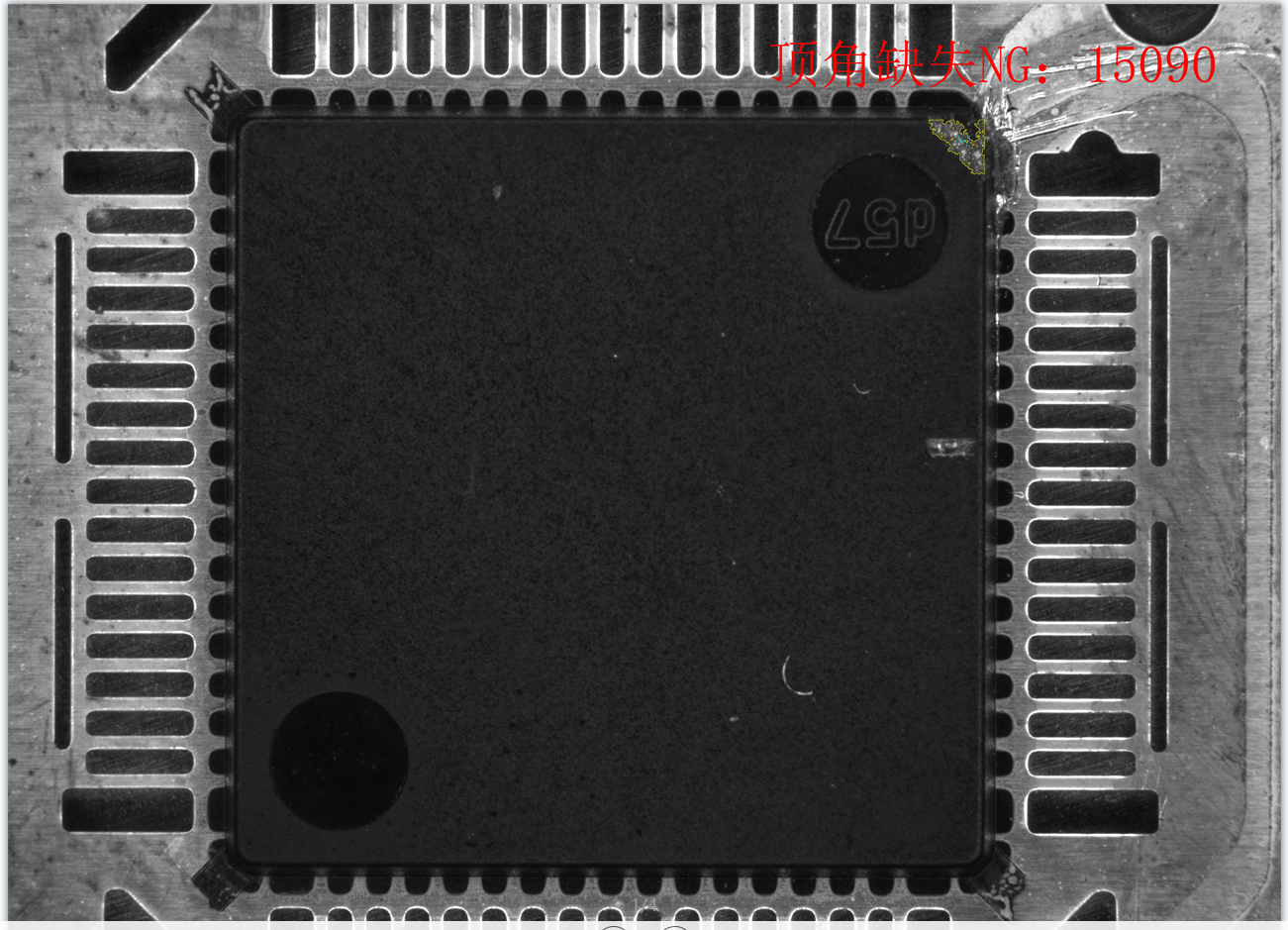
 芯片封装引线框架四面封胶视觉检测系统
2026-05-17
芯片封装引线框架四面封胶视觉检测系统
2026-05-17
四面封胶后的视觉检测是引线框架封装产线的关键质检环节,主要用于检测溢胶、气泡、缺胶、异物以及键合线损伤等问题。目前的系统方案通常采用2D+3D光学检测与深度学习算法相结合的方式,以实现高精度、高通量的自动化检测。
 晶圆缺失图案机器视觉检测系统
2026-05-10
晶圆缺失图案机器视觉检测系统
2026-05-10
晶圆缺失图案(即图案化晶圆)的机器视觉检测,是半导体制造中确保良率的核心环节。它利用光学、图像处理和AI技术,在纳米级尺度上识别晶圆表面的各种图案缺陷。
 晶圆金属线短路机器视觉检测系统
2026-05-10
晶圆金属线短路机器视觉检测系统
2026-05-10
晶圆金属线(互连线)的短路检测,是半导体制造中良率控制的关键环节。随着制程工艺向纳米级(7nm、5nm甚至更先进)发展,金属线宽度仅为几十纳米,间距极小,传统的自动光学检测面临巨大挑战。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
