




服务热线
0769-28680919
153-2293-3971 / 177-0769-6579

机器视觉定位与引导系统方案是工业自动化领域中的一项关键技术,它结合了机器视觉和机器人技术,以实现精确的定位和引导操作。这些系统广泛应用于制造业,特别是在需要精确抓取、组装、定位和检测的场景中。以下是一些常见的机器视觉定位与引导系统方案:
1. 单相机抓取定位引导:
- 在这种方案中,一个相机被用来捕捉传送带上的物料图像。
- 机器视觉系统分析图像,确定物料的位置和方向。
- 机器人根据视觉系统提供的位置信息进行精确抓取。
2. 单相机纠偏引导:
- 适用于需要对放置或抓取的物料进行位置校正的场景。
- 相机捕捉物料图像,并通过视觉系统分析其偏差。
- 机器人根据分析结果进行调整,以确保物料正确放置或抓取。
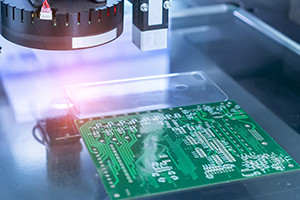
3. 上下相机贴合定位引导:
- 这种方案通常用于需要精确对位的场景,如3C产品屏幕和电路板的贴合。
- 上下两个相机分别捕捉不同视角的图像,以提高定位精度。
- 视觉系统分析上下图像,指导机器人进行精确贴合。
4. 手眼标定:
- 手眼标定是机器视觉与机器人结合应用的核心,它解决了相机(眼)与机械手(手)之间的坐标转换关系。
- 通过标定,确保机械手能够根据相机的定位信息精确抓取目标。
5. 多相机系统:
- 在一些复杂的应用场景中,可能需要多个相机来覆盖更大的视野或提供更多的视角。
- 多相机系统可以提供更全面的视觉信息,帮助机器人在三维空间中进行精确操作。
6. 与机器人的通信集成:
- 机器视觉系统需要与机器人控制系统无缝集成,以实现实时的定位引导。
- 常见的通信协议包括TCP/IP、串行通信、以太网等。
7. 软件平台支持:
- 强大的视觉软件平台,如康耐德智能的工业视觉系统,提供了丰富的视觉工具和手眼标定功能。
- 软件平台支持多种标定方法,如九点标定和十二点标定,以及多种对位方式。
这些方案的实施可以显著提高生产效率、减少人工操作、提升产品质量,并适应快速变化的生产需求。随着技术的进步,机器视觉定位与引导系统将继续发展,提供更多的功能和更高的精度。
 输液瓶液位高度机器视觉检测系统
2026-04-24
输液瓶液位高度机器视觉检测系统
2026-04-24
输液瓶(通常为玻璃或聚丙烯材质,透明或半透明)液位的检测,主要难点在于液体透明、反光、以及液体与空气的分界线(月牙面)特征不明显。
 液体药品不溶性微粒机器视觉检测系统
2026-04-24
液体药品不溶性微粒机器视觉检测系统
2026-04-24
液体药品中的不溶性微粒(如玻璃屑、纤维、气泡等)是影响药品安全的关键风险因素。传统的人工灯检依赖肉眼,存在效率低、标准不统一、易疲劳漏检等问题。基于机器视觉的自动化检测系统,正在成为制药行业质量控制的主流方案。
 康耐德智能晶圆光刻胶涂布缺陷机器视觉检测系统
2026-04-19
康耐德智能晶圆光刻胶涂布缺陷机器视觉检测系统
2026-04-19
康耐德智能晶圆光刻胶涂布缺陷机器视觉检测系统,是半导体前道工序中实现高精度、高一致性质量控制的核心装备。光刻胶涂布的均匀性直接决定了光刻分辨率与良率,任何微米级甚至纳米级的缺陷都可能导致芯片失效。
 康耐德智能晶圆二维码机器视觉识别系统
2026-04-19
康耐德智能晶圆二维码机器视觉识别系统
2026-04-19
在半导体制造中,由于晶圆是高度洁净、价值极高的载体,且随着制程微缩(如5nm、3nm),晶圆表面的特征极度精细,因此这套识别系统面临着普通二维码识别系统完全不同的技术挑战。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
