





服务热线
0769-28680919
153-2293-3971 / 177-0769-6579


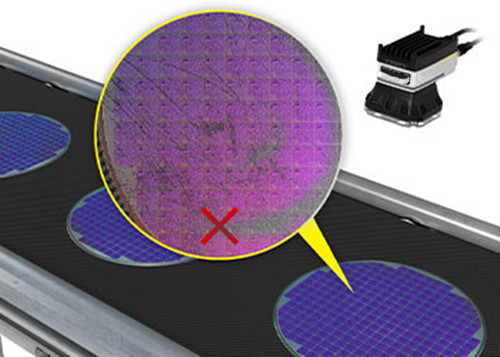
机器视觉缺陷检测的实现方法主要包括以下几个步骤:
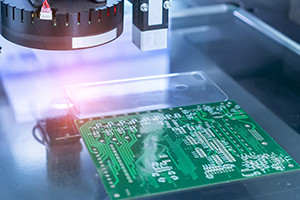
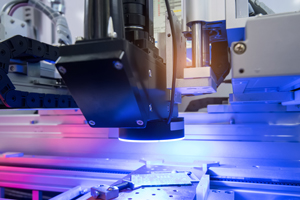
1. 图像获取:通过摄像机或其他图像采集设备获取产品的图像,也可以采集连续的图像序列。
2. 图像预处理:对采集到的图像进行预处理,包括去噪、灰度化和平滑滤波等,以增强图像的对比度和细节。
3. 特征提取:从预处理后的图像中提取出与缺陷相关的特征,如边缘、纹理和色彩等,这可以通过图像处理算法或特征描述子等方法实现。
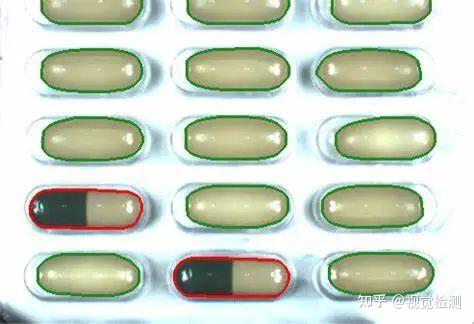
4. 缺陷检测与分类:利用机器学习和模式识别算法,将提取到的特征与已知的缺陷样本进行比对和分类,以实现缺陷的自动检测和分类。
5. 缺陷定位与标注:对检测出的缺陷进行定位和标注,确定它们在图像中的位置和大小,这可以利用图像处理算法和边缘检测算法来实现。
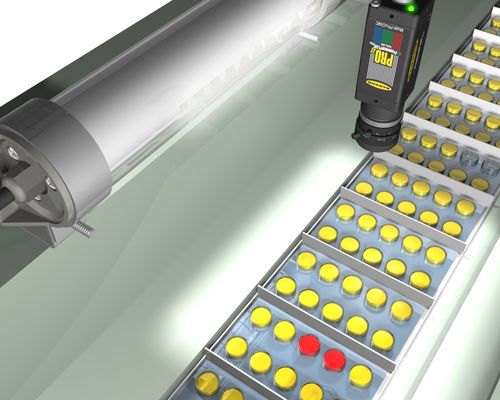
6. 缺陷判定与处理:根据预设的判定准则,对检测出的缺陷进行判定,确定是否为真实的缺陷,并采取相应的处理措施,如剔除、修复等。
7.数据分析与统计:对检测结果进行统计和分析,得出缺陷的发生频率、位置分布等信息,以便于生产过程的改进和优化。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
