




服务热线
0769-28680919
153-2293-3971 / 177-0769-6579

为确保CCD机器视觉系统长期稳定、精准运行,可把“日常维护”与“定期校准”拆成两条线管理,关键技巧如下(按“日周月季”频次归纳,并给出易忽略的要点):

一、日常维护技巧
1. 每日必做
镜头/防护玻璃“干式”除尘:先用气吹+软毛刷,再用无水乙醇+无尘布单向轻擦,拒绝来回抹,避免镀膜划伤。
检查光源亮度:打开“灰度直方图”看峰值是否漂移>5%,若掉亮度先擦灯珠表面,再查驱动电流。
机台5S:清除飞尘、切削液,防止导轨、光学罩壳积污后二次扬尘。
2. 每周补充
电缆“晃捏看”:晃一下查折弯疲劳、捏接头查松动、看护套有无龟裂;有隐患立刻贴色标并安排备件。
防尘/干燥剂状态:湿度卡>60%区段变粉即需更换干燥剂,避免镜头起雾、PCB氧化。
备份图像&日志:把前一周OK/NG图例、系统日志拷出,既防数据丢失,也方便后续故障追溯。
3. 每月深度
电气箱“吸刷测”:防静电刷清灰→微型吸尘器二次清理→万用表量24 V/12 V/5 V三档带载压降>0.2 V即查端子。
机械紧固:对相机支架、光源支架、XY平台的所有螺丝用扭力起子复紧,防震动走位;同时给导轨/丝杆补0.51 cc润滑脂。
软件体检:更新显卡/相机SDK→核对DLL版本;再跑一次“坏点检测”算法,把新增坏像元坐标写进掩模文件。
4. 每季保养
完整灰尘图(Flatfield)校正:用均匀白板采图,生成像素增益修正表,消除镜头渐晕与CCD响应不均。
环境点检:温度2025 ℃、湿度4060% RH记录趋势;若昼夜波动>±3 ℃,考虑加空调或风扇循环。
备件轮换:把备用相机、光源轮换上线运行24 h,确认完好后再封存,避免“库存失效”。
二、校准技巧与流程
1. 内部参数校准(焦距、畸变、像素当量)
工具:玻璃栅格板(线宽±1 µm)或圆点标定板;halcon/OpenCV标定例程。
步骤:
1. 把标定板放在工作距±2 mm范围内,取59个位姿(倾斜15°30°);
2. 提取角点→计算相机内参矩阵、畸变系数;
3. 生成“像素→物理”当量文件,RMS误差控制在0.05 pixel以内。
周期:更换镜头、调焦、温度冲击后必须重标;正常产线建议3个月复验一次。
2. 外部/手眼校准(世界坐标↔像素坐标)
单相机静态方案:用精密针规或陶瓷量块做9点、25点网格,计算 affine/homography 矩阵;线性度误差>±0.02 mm时微调安装角度或重新采点。
机器人手眼方案:做“AXXB”求解,先让机械臂走610组不同位姿拍同一标定板,再解算相机↔法兰旋转平移矩阵;最后验证重投影误差<0.1 mm。
经验:标定完立刻在工装夹具刻“零位”标记,后续若被撞机可快速复原。
3. 光源/灰度校准
目的:消除LED老化、供电波动导致的测量阈值漂移。
方法:把标准白块放在检测位,连续采30张图,统计平均灰度;若均值与基准值偏差>±3 DN(8bit),先调驱动电流恢复,再更新检测阈值。
周期:高亮频闪应用可每周一次,普通漫射场景每月一次即可。
4. 坏点&平场修正
拍封闭暗场→得“暗电流图”;拍均匀亮场→得“增益图”;两图相除生成“像素级修正表”,写进FPGA或软件,实时补偿。
坏点簇>3×3或单点响应偏差>±10%即判废,用周围像素线性插值替代。
5. 校准后的锁定与追溯
把标定参数、日期、操作人、环境温湿度写入二维码贴于相机支架;版本号同步录入MES,防止混产。
关键尺寸(缝隙、孔径)CPK掉>15%时,先扫码核对校准版本,再决定重采参数还是回机械零位,可减少误判停机。
三、易被忽视的细节
清洁液要选“电子级异丙醇”,镜头镀膜对丙酮、香蕉水极敏感。
拆下相机后,一定在USB/网口贴防静电贴;CCD芯片若被人体静电击穿,坏点无法修复。
校准板表面玻璃厚度若>2 mm,记得在算法里修正“折射偏移”,否则Z向高度会虚高十几微米。
若现场有振动源(冲床、空压机),在相机支架下加“阻尼垫+惯性块”,能把图像边缘模糊度降低30%以上。
坚持“日清周检月校季审”的节奏,配合双人复核、数据化记录,可把CCD视觉系统的测量漂移控制在±0.01 mm以内,硬件寿命普遍延长1520%,突发故障率下降约40%。
 药瓶外观缺陷视觉检测系统
2026-05-31
药瓶外观缺陷视觉检测系统
2026-05-31
药瓶外观缺陷检测主要采用机器视觉+深度学习技术,替代传统人工目检,解决效率低、主观性强、易疲劳等问题。现代检测系统可实现每分钟400-1000个药瓶的高速在线检测,识别准确率达99%以上。
 输液瓶标签缺陷机器视觉检测系统
2026-05-31
输液瓶标签缺陷机器视觉检测系统
2026-05-31
输液瓶标签缺陷机器视觉检测系统是制药行业GMP(药品生产质量管理规范)合规的关键质量控制环节,用于替代传统人工灯检,实现100%全检、零缺陷出厂目标。该系统能够在高速生产线上(可达400-700瓶/分钟)实时检测标签的各类缺陷。
 液体药品瓶盖密封性机器视觉检测系统
2026-05-24
液体药品瓶盖密封性机器视觉检测系统
2026-05-24
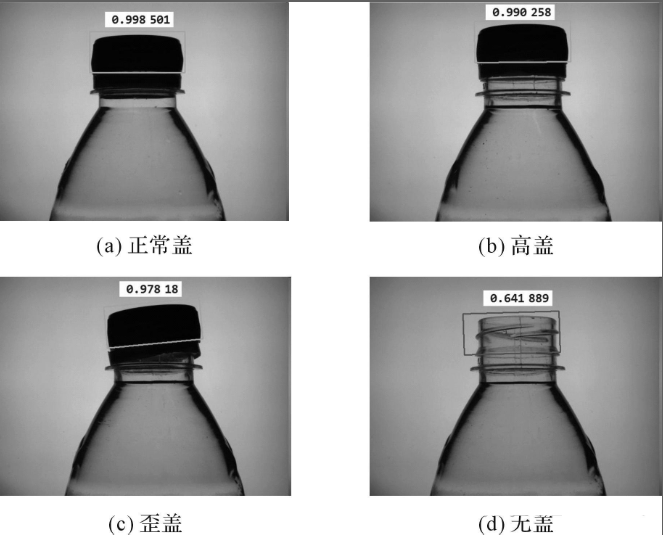
液体药品瓶口缺陷机器视觉检测系统是制药行业关键的质量控制设备,主要用于检测玻璃瓶、塑料瓶等容器在灌装后的瓶口完整性,防止玻璃碎屑、密封不良等缺陷导致药液污染或泄漏。该系统通常安装在灌装工序后,通过高速成像和AI算法实现100%在线检测。
 液体药品瓶口缺陷机器视觉检测系统
2026-05-24
液体药品瓶口缺陷机器视觉检测系统
2026-05-24
液体药品瓶口缺陷检测是制药和包装行业的关键质量控制环节。由于瓶口缺陷(如裂纹、破损)可能导致漏液、污染甚至玻璃碎屑混入药品,传统人工检测已难以满足高速产线的精度和效率要求。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
