




服务热线
0769-28680919
153-2293-3971 / 177-0769-6579

该系统旨在解决柔性电路板点胶过程中,因FPC来料位置偏差、治具装夹误差、热膨胀变形等因素导致的点胶路径不准确问题。通过机器视觉实时“看”到FPC上的基准特征,并与预设的“理论位置”进行比对,计算出偏移量(X, Y, θ),然后动态修正点胶头的运动路径,确保胶水精确涂敷在目标位置上。

系统核心构成
软件部分:
图像采集:控制相机拍照。
图像预处理:滤波、二值化、形态学操作等,以优化图像质量。
特征定位算法:核心中的核心。常用:
模板匹配:如NCC(归一化互相关)、形状匹配,用于定位FPC上的Mark点(如实心圆、十字、特征孔)。
Blob分析:用于分析连通域,定位特征区域。
边缘提取与拟合:如找圆、找线,精确定位特征边缘。
坐标变换与纠偏计算:
通过2个或以上非共线的Mark点,计算当前FPC相对于理论位置的平移(ΔX, ΔY)和旋转(Δθ)。
将计算出的偏移量,通过手眼标定(或相机机器人标定)转换到点胶机的坐标系下。
通信与控制模块:将修正后的坐标发送给点胶机控制器。
关键技术挑战与对策
1. FPC表面反光与多样性:
挑战:不同批次FPC的油墨颜色、铜箔光泽可能不同,影响特征识别稳定性。
对策:采用多通道照明控制,根据来料自动或手动切换最佳光源方案;使用偏振片消除镜面反光;优化图像预处理算法,增强特征鲁棒性。
2. 精度要求高:
挑战:点胶精度常要求在±0.05mm甚至更高。
对策:选用高分辨率相机+远心镜头;进行高精度亚像素定位算法;保证稳定的机械结构和环境温度。
3. 速度与节拍要求:
挑战:不能因视觉处理拖慢生产节拍。
对策:优化算法,使用GPU加速;选择高帧率相机;采用“飞行拍照”或“一次拍照定位多个特征”的策略。
4. 软件易用性与稳定性:
对策:选择成熟的视觉软件平台或专用的点胶视觉系统(很多点胶机厂商提供集成方案)。良好的UI便于操作员教导和调试。
选型与实施建议
先做可行性分析:获取实际的FPC样品,用不同光源和相机进行打光测试,确认关键特征能否稳定、清晰地被提取。
明确需求指标:精度(重复定位精度、绝对精度)、速度(处理时间)、FPC尺寸、工作距离。
集成方式:
方案一:购买集成化的点胶视觉系统。优点是开发周期短,稳定性有保障,供应商提供整体支持。
方案二:自主集成。购买通用视觉组件(相机、镜头、光源),自行或委托开发软件。优点是灵活,可深度定制,但需要较强的技术团队。
重视标定和调试:系统的最终精度极大依赖于标定的准确性和现场工艺参数的调试优化。
FPC点胶胶路纠偏视觉系统是提升点胶工艺良率、一致性和自动化水平的关键装备。其成功实施是一个光、机、电、算紧密结合的工程。核心在于通过稳定可靠的图像获取和高精度的坐标计算,将视觉感知信息实时转化为对执行机构的精确控制指令,从而克服FPC生产中固有的各种偏差,实现高质量的点胶加工。
如果您有具体的应用场景(如点胶类型、精度要求、预算等),我可以提供更针对性的建议。
 药瓶外观缺陷视觉检测系统
2026-05-31
药瓶外观缺陷视觉检测系统
2026-05-31
药瓶外观缺陷检测主要采用机器视觉+深度学习技术,替代传统人工目检,解决效率低、主观性强、易疲劳等问题。现代检测系统可实现每分钟400-1000个药瓶的高速在线检测,识别准确率达99%以上。
 输液瓶标签缺陷机器视觉检测系统
2026-05-31
输液瓶标签缺陷机器视觉检测系统
2026-05-31
输液瓶标签缺陷机器视觉检测系统是制药行业GMP(药品生产质量管理规范)合规的关键质量控制环节,用于替代传统人工灯检,实现100%全检、零缺陷出厂目标。该系统能够在高速生产线上(可达400-700瓶/分钟)实时检测标签的各类缺陷。
 液体药品瓶盖密封性机器视觉检测系统
2026-05-24
液体药品瓶盖密封性机器视觉检测系统
2026-05-24
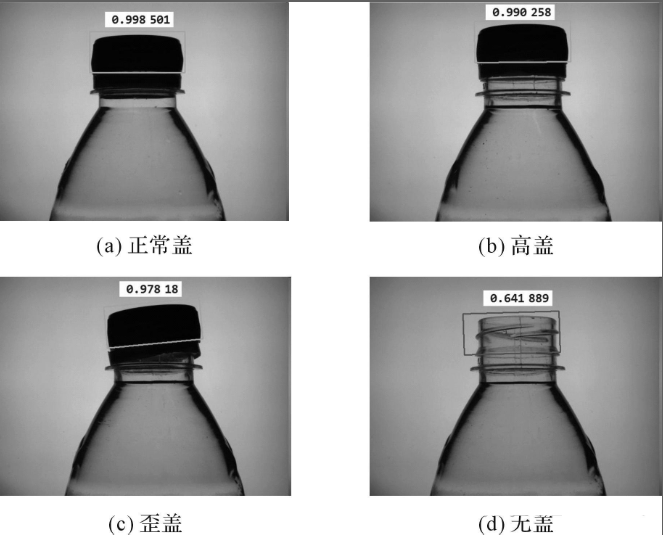
液体药品瓶口缺陷机器视觉检测系统是制药行业关键的质量控制设备,主要用于检测玻璃瓶、塑料瓶等容器在灌装后的瓶口完整性,防止玻璃碎屑、密封不良等缺陷导致药液污染或泄漏。该系统通常安装在灌装工序后,通过高速成像和AI算法实现100%在线检测。
 液体药品瓶口缺陷机器视觉检测系统
2026-05-24
液体药品瓶口缺陷机器视觉检测系统
2026-05-24
液体药品瓶口缺陷检测是制药和包装行业的关键质量控制环节。由于瓶口缺陷(如裂纹、破损)可能导致漏液、污染甚至玻璃碎屑混入药品,传统人工检测已难以满足高速产线的精度和效率要求。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
