




服务热线
0769-28680919
153-2293-3971 / 177-0769-6579

焊接机器人根据3D视觉数据进行自适应调整的方式主要包括以下几个方面:
焊缝寻位与跟踪:
3D视觉系统能够通过一次或多次探寻定位焊缝,实现焊接前的精准定位焊接接头。
在焊接过程中,3D视觉系统能够实时跟踪焊缝,通过自适应模糊控制算法校正轨迹,实现自适应控制与实时焊缝跟踪。
焊接路径规划:
3D视觉引导技术通过对焊接工件进行三维扫描,生成精确的焊接路径规划,确保焊接焊缝的完整性和一致性。
焊缝检测与质量控制:
利用3D视觉技术可以对焊缝进行高精度的检测和识别,实时监测焊接过程中的质量状况,及时调整焊接参数。
3D视觉引导技术可实时监测焊接过程中温度、焊缝形貌等信息,帮助提高焊接质量,减少焊接缺陷。
工件姿态定位与原点定位:
系统可以对工件的摆放姿态以及开始焊接原点进行定位,引导机械臂进行高精度的焊接作业。
智能算法提取焊缝信息:
高精度3D相机通过拍摄获得工件的三维点云,再利用智能算法提取出视野内全部的焊缝信息,得到准确的焊接点位信息,同时计算出机器人的焊接姿态。
自动标定与通讯协议对接:
自动标定软件能够计算机器人末端执行器和3D相机相对位置关系,将视觉坐标系和机器人坐标系进行统一,便于通过视觉引导机器人执行预定的空间轨迹与加工任务。
3D视觉系统支持多种通讯协议,可与国内外多品牌机器人适配,实现检测结果直接对接机械臂控制系统。
环境适应性:
3D视觉系统支持在强光环境下的高精度建模,支持物体表面反光以及抛光材质的无噪点建模,不受环境光限制。
通过这些技术,焊接机器人能够根据3D视觉数据进行自适应调整,提高焊接精度和效率,降低对工件特征和编程的要求,实现更智能化和自动化的焊接生产。
 晶圆线宽机器视觉测量系统
2026-07-05
晶圆线宽机器视觉测量系统
2026-07-05
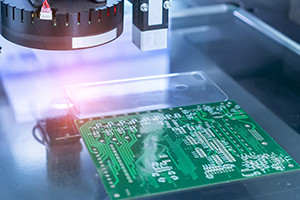
晶圆线宽机器视觉测量系统是半导体制造前道工艺中的关键质量控制设备,用于在线监测关键尺寸(CD, Critical Dimension)。随着制程节点迈向3nm及以下,这项技术正面临精度、速度与可靠性等多重挑战。
 晶圆薄膜沉积后的颗粒机器视觉检测系统
2026-07-05
晶圆薄膜沉积后的颗粒机器视觉检测系统
2026-07-05
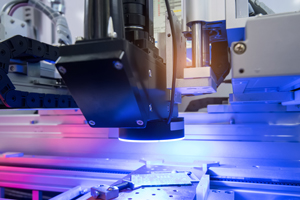
晶圆薄膜沉积后的颗粒检测,是半导体良率控制的关键环节。针对这一需求,目前的机器视觉检测系统已形成多技术融合的成熟方案,核心思路是通过先进光学成像捕捉颗粒,再由AI算法完成识别与分类。
 多芯片封胶质量视觉检测系统
2026-06-28
多芯片封胶质量视觉检测系统
2026-06-28
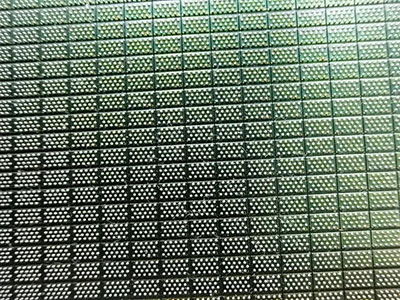
多芯片封胶质量检测是半导体封装环节的关键工序。封胶(Molding/Underfill)不仅保护内部芯片和引线,还直接影响器件的散热和机械可靠性。针对这一检测需求,当前行业已经形成了从 2D/3D 外观检测到内部无损探伤的综合技术体系。
 芯片引线键合保护胶涂覆视觉检测系统
2026-06-28
芯片引线键合保护胶涂覆视觉检测系统
2026-06-28
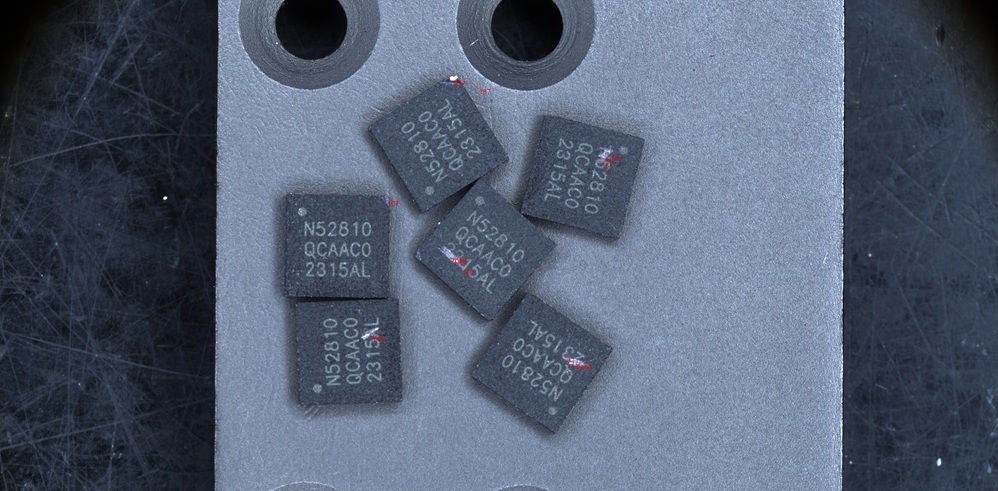
芯片引线键合后涂覆保护胶,是为了防潮、防震、防尘。但这个环节容易出现漏胶、溢胶、气泡、断线等问题,且金线和焊点极为精细微小,必须用高精度的视觉系统来把关。
 官方公众号
官方公众号 官方抖音号
官方抖音号Copyright © 2022 东莞康耐德智能控制有限公司版权所有.机器视觉系统 粤ICP备2022020204号-1 联系我们 | 网站地图
